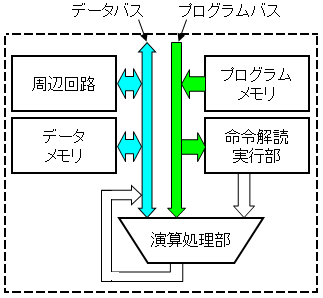
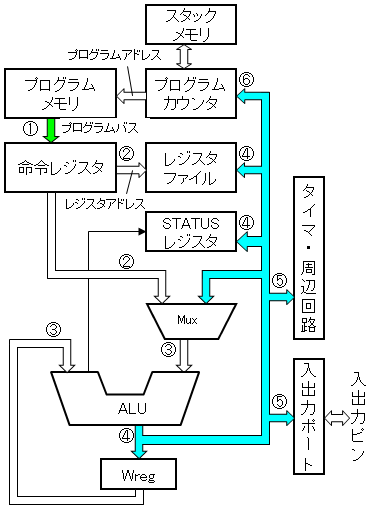
プログラムメモリ
program memory |
プログラムを格納するメモリ. |
スタックメモリ
stack memory |
サブルーチンや割り込みの戻り番地を格納する専用メモリ.
命令では操作できない. |
プログラムカウンタ
program counter |
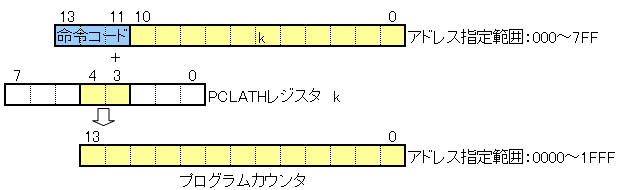
プログラムの実行を制御するカウンタ.プログラムカウンタの内容がアドレスとなり,そのアドレスで指定されたプログラムメモリ内の命令が,次に実行される命令となる. |
レジスタファイル
file register |
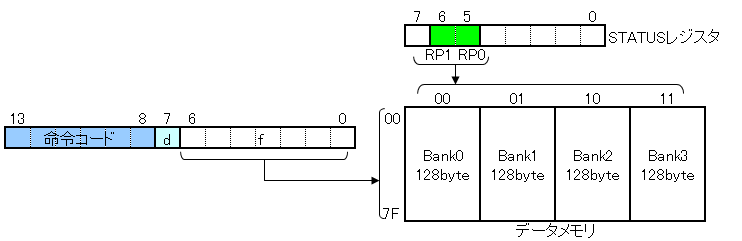
レジスタ群により構成されるデータ格納用メモリ.
PIC 特有のアーキテクチャ.
2 つの領域からなり,1 つは汎用のデータ領域であり,プログラム内で使う変数領域として使用する(GPR:General Purpose Register).
もう 1 つは特別なレジスタ領域であり,SFR(Special Fanction Resister)と呼ばれ,内蔵周辺回路の動作を制御するために使用される.入出力ポートも
SFR に属する. |
STATUSレジスタ
STATUS register |
演算結果の状態,ゼロ,Carry 等を保持するレジスタ.
条件分岐時等のフラグとして使用する. |
命令レジスタ
instruction register |
プログラムメモリから読み出された命令がセットされ,命令の種類の解読と処理が行われる. |
MUX
mutiplexer |
各命令の指示に従って各種レジスタや Wreg の内容との演算がなされる部分.
演算結果は Wreg や入出力ポートやタイマ,プログラムカウンタ等に格納される. |
ALU
arithmetic logic unit |
Wreg
working register |
演算データ一時保管用レジスタ. |
データバス
data bus |
命令実行に関係するデータを運ぶ通信路.
8 bit のデータを扱うため,8 本の線で構成されている. |
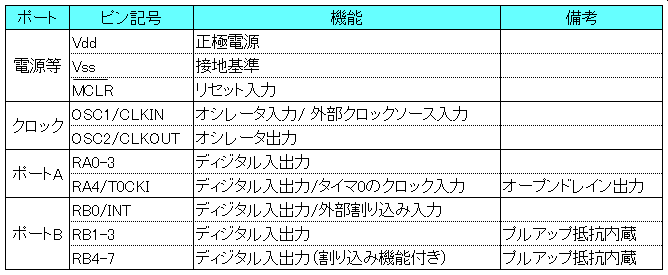
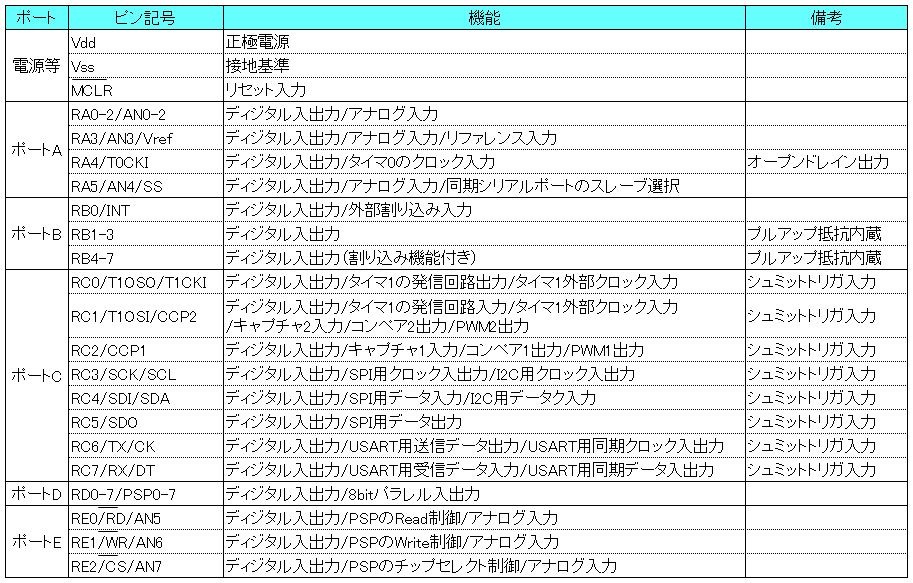
入出力ポート
I/O port |
PIC 内部に外部からデータを入力,もしくは内部のデータを外部に出力するためのポート. |





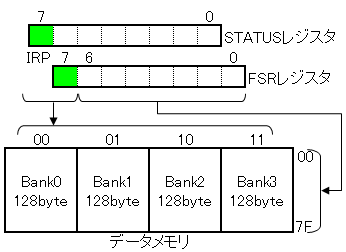 データメモリのアクセスには,直接レジスタのアドレスを指定する直接アドレッシング以外に,間接アドレッシングと言う方法がある.間接アドレッシングには,プログラムで書き換え可能な SFR
である FSR レジスタと STATUS レジスタの IRP ビットを使用する.
データメモリのアクセスには,直接レジスタのアドレスを指定する直接アドレッシング以外に,間接アドレッシングと言う方法がある.間接アドレッシングには,プログラムで書き換え可能な SFR
である FSR レジスタと STATUS レジスタの IRP ビットを使用する.